
Descubre para qué sirve el Bus I2C Arduino y como sacarle el mejor partido posible en tus proyectos de electrónica DIY.
Contenido
Introducción
No hace mucho escribí una guía de componentes básicos de Arduino, donde te enseño los básicos con los que se pueden emprender muchísimos proyectos, y de hecho mencioné el concepto I2C en esta guía.
Cuando trabajamos con proyectos en Arduino tarde o temprano acabamos tocando el Bus I2C, concretamente en el momento que salimos de los sensores básicos como DHT11 y el uso de leds, suele ser el siguiente paso.
Este bus nos permite conectar de forma sencilla componentes que de otra forma necesitarían bastantes pines.
Para que te hagas una idea, muchas pantallas necesitan hasta 16 pines para funcionar. ¿Te imaginas conectar eso a tu proyecto?
En el momento que lo hagas te has quedado sin pines.
Sin embargo, pasando a buses I2C puedes reducir esto a 4 pines en tu Arduino.
Bus I2C en Arduino
¿Qué es el Bus I2C?
El Bus I2C, conocido como Inter-Integrated Circuit, es una herramienta esencial en la comunicación entre microcontroladores y periféricos.
Imagina un sistema donde varios dispositivos pueden hablar entre sí utilizando solo dos cables: uno para los datos (SDA) y otro para el reloj (SCL).
Esta eficiencia en el uso de cables es uno de los mayores atractivos del I2C, especialmente en proyectos de Arduino donde la simplicidad y el espacio son menester.
Importancia del Bus I2C en Proyectos con Arduino
La relevancia del Bus I2C en proyectos con Arduino no puede subestimarse. En primer lugar, al reducir la cantidad de cables necesarios, facilita un diseño de circuito mucho más limpio y manejable.
Pero la verdadera magia del I2C radica en su capacidad para conectar múltiples dispositivos en el mismo bus, cada uno con una dirección única.
Esto permite una expansión virtualmente ilimitada de tu proyecto sin necesidad de sacrificar pines de E/S valiosos en tu Arduino.
El Bus I2C es especialmente útil en aplicaciones complejas donde necesitas integrar varios sensores, displays y otros módulos.
Por ejemplo, podrías tener un sensor de temperatura, un reloj en tiempo real y una pantalla LCD, todos conectados al mismo par de cables SDA y SCL, comunicándose de manera eficiente con el microcontrolador.
Además, la biblioteca Wire de Arduino hace que la implementación del I2C sea extremadamente sencilla. Con funciones predefinidas, puedes configurar y manejar la comunicación I2C con apenas unas líneas de código, permitiéndote centrarte en lo que realmente importa: la funcionalidad y el rendimiento de tu proyecto.
En conclusión, el Bus I2C no solo simplifica la vida del desarrollador, sino que también abre un mundo de posibilidades para proyectos más avanzados y eficientes. Es una herramienta fundamental que, cuando se domina, puede transformar tus ideas en soluciones prácticas y poderosas.
Conceptos Básicos del Bus I2C
Comunicación Maestro-Esclavo
Los buses I2C, al igual que muchos componentes informáticos old-school la comunicación se basa en un modelo maestro-esclavo.
Este modelo es sencillo pero poderoso: un dispositivo maestro (normalmente tu Arduino) controla la red, mientras que uno o varios dispositivos esclavos responden a las solicitudes del maestro.
El maestro inicia la comunicación y controla el flujo de datos, enviando órdenes a los esclavos para que estos respondan con la información requerida o ejecuten comandos específicos.
Cada dispositivo en el bus I2C tiene una dirección única de 7 bits, lo que permite hasta 127 dispositivos esclavos (dejando una dirección reservada).
Cuando el maestro quiere comunicarse con un esclavo específico, envía un byte de dirección seguido de un bit de lectura/escritura. Si el esclavo reconoce su dirección, responde y la comunicación continúa.
Direccionamiento I2C
El direccionamiento en el Bus I2C es una de sus características más destacadas. Cada dispositivo conectado al bus debe tener una dirección única.
Estas direcciones se definen generalmente en el hardware del dispositivo y se configuran mediante pines de dirección. En algunos casos, las direcciones se pueden cambiar programáticamente, pero eso depende del dispositivo específico.
Para identificar los dispositivos en el bus, el maestro envía una condición de inicio seguida de la dirección del esclavo con el que quiere comunicarse.
Si el esclavo reconoce su dirección, envía una señal de reconocimiento (ACK) al maestro, y la comunicación puede proceder.
Este sistema de direccionamiento hace que el Bus I2C sea extremadamente flexible y escalable, permitiendo la adición de nuevos dispositivos sin grandes cambios en el hardware o el software.
Velocidades de Operación
El Bus I2C admite diferentes velocidades de operación para adaptarse a las necesidades de tu proyecto. Las velocidades estándar incluyen:
- Estándar (100 kHz): Adecuada para la mayoría de las aplicaciones básicas.
- Rápida (400 kHz): Para aplicaciones que requieren mayor velocidad de comunicación.
- Alta velocidad (3.4 MHz): Utilizada en aplicaciones donde la velocidad es crítica, aunque no todos los dispositivos soportan esta velocidad.
La velocidad de operación se puede configurar en el código del Arduino usando la función Wire.setClock(frecuencia), permitiendo ajustar la frecuencia según los requisitos de los dispositivos conectados y las necesidades del proyecto.
Con estos conceptos básicos en mente, puedes empezar a diseñar y configurar tus proyectos con el Bus I2C, aprovechando su simplicidad y eficiencia para crear sistemas más complejos y funcionales.
Configuración del Bus I2C en Arduino
Requisitos de Hardware
Para configurar el Bus I2C en tu Arduino, primero necesitas conocer los pines involucrados. En la mayoría de las placas Arduino, los pines dedicados para I2C son los siguientes:
- SDA (Serial Data Line): Este es el pin donde se envían y reciben los datos. En el Arduino Uno, es el pin A4.
- SCL (Serial Clock Line): Este es el pin que proporciona la señal de reloj. En el Arduino Uno, es el pin A5.
Conexiones Eléctricas
Las conexiones para establecer la comunicación I2C son bastante simples. Aquí hay una guía básica para conectar un dispositivo esclavo I2C a tu Arduino:
- Conectar el SDA y SCL: Conecta el pin SDA del Arduino al pin SDA del dispositivo esclavo. Haz lo mismo con el pin SCL.
- Alimentación: Asegúrate de que el dispositivo esclavo esté correctamente alimentado. Muchos dispositivos I2C funcionan a 3.3V o 5V. Conecta el pin VCC del dispositivo esclavo al pin de 3.3V o 5V del Arduino, según sea necesario.
- GND: Conecta el pin GND del dispositivo esclavo al pin GND del Arduino.
Una vez hechas estas conexiones, los dispositivos deberían poder comunicarse a través del bus I2C. Este setup básico es esencial para cualquier proyecto que desee utilizar esta comunicación.
Programación del Bus I2C en Arduino
Biblioteca Wire
La biblioteca Wire es fundamental para manejar la comunicación I2C en Arduino. Esta biblioteca proporciona funciones predefinidas que simplifican la implementación y el manejo del Bus I2C. La inclusión de esta biblioteca se hace al inicio de tu código:
#include <Wire.h>Código Básico para Comunicación
Iniciación de la Comunicación
Para comenzar a usar el Bus I2C, primero debes inicializar la biblioteca Wire. Esto se hace dentro de la función setup() de tu sketch:
void setup() {
Wire.begin(); // Inicializa I2C como maestro
}Si estás configurando tu Arduino como esclavo, debes especificar una dirección:
void setup() {
Wire.begin(0x08); // Inicializa I2C como esclavo en la dirección 0x08
}Envío de Datos
Enviar datos a través del Bus I2C es un proceso de tres pasos: comenzar la transmisión, escribir los datos y finalizar la transmisión.
Wire.beginTransmission(0x08); // Inicia la transmisión con el dispositivo en la dirección 0x08
Wire.write("Hola, Arduino"); // Escribe los datos al bus
Wire.endTransmission(); // Finaliza la transmisiónRecepción de Datos
Para recibir datos, primero solicitas los datos del esclavo y luego los lees del bus.
Wire.requestFrom(0x08, 6); // Solicita 6 bytes del dispositivo en la dirección 0x08
while (Wire.available()) { // Continúa si hay datos disponibles
char c = Wire.read(); // Lee un byte de datos
Serial.print(c); // Imprime el byte recibido
}Ejemplo Completo de Comunicación Maestro-Esclavo
A continuación, un ejemplo completo que muestra cómo configurar un Arduino como maestro y otro como esclavo para comunicarse a través del Bus I2C.
Código del Maestro
#include <Wire.h>
void setup() {
Wire.begin(); // Inicializa I2C como maestro
Serial.begin(9600); // Inicializa comunicación serial para monitoreo
}
void loop() {
Wire.beginTransmission(0x08); // Inicia la transmisión con el esclavo en la dirección 0x08
Wire.write("Hola, Esclavo"); // Envía mensaje
Wire.endTransmission(); // Finaliza la transmisión
delay(1000); // Espera 1 segundo antes de enviar el siguiente mensaje
}Código del Esclavo
#include <Wire.h>
void setup() {
Wire.begin(0x08); // Inicializa I2C como esclavo en la dirección 0x08
Wire.onReceive(receiveEvent); // Registra la función de evento de recepción
Serial.begin(9600); // Inicializa comunicación serial para monitoreo
}
void receiveEvent(int howMany) {
while (Wire.available()) { // Lee mientras haya datos disponibles
char c = Wire.read(); // Lee un byte de datos
Serial.print(c); // Imprime el byte recibido
}
Serial.println(); // Nueva línea para separación de mensajes
}
void loop() {
// El loop se mantiene vacío, la recepción es manejada por el evento
}Estos ejemplos básicos te permitirán establecer una comunicación sencilla entre dos Arduinos usando el Bus I2C. Puedes expandir estos ejemplos para incluir múltiples dispositivos y manejar datos más complejos, adaptando las funciones de lectura y escritura según sea necesario.
Hardware I2C Común
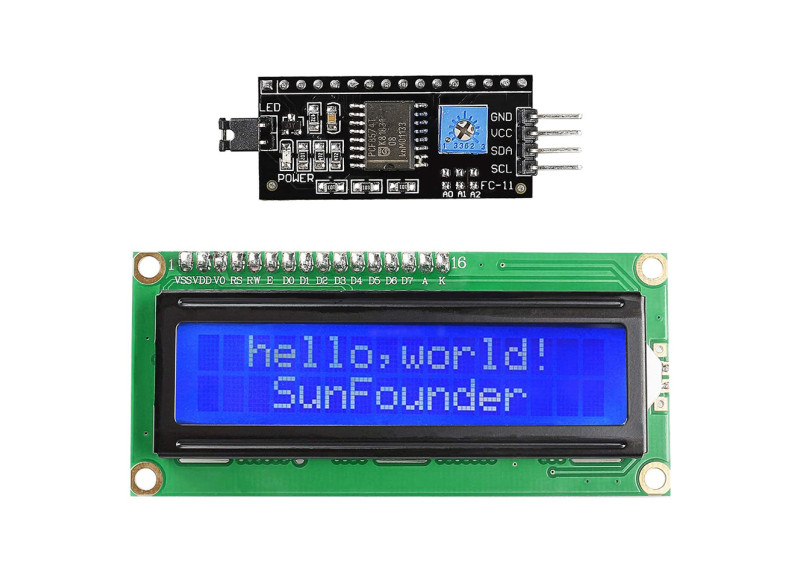
Pantallas LCD I2C
Las pantallas LCD con interfaz I2C son componentes muy populares en proyectos de Arduino debido a su facilidad de uso y la reducción de pines necesarios para su funcionamiento.
Estas pantallas permiten mostrar información de manera clara y legible, y gracias al bus I2C, solo se necesitan dos pines para su conexión, en lugar de los múltiples pines que requieren las pantallas LCD estándar.
Instalación y Conexión
Para conectar una pantalla LCD I2C a tu Arduino, sigue estos pasos:
- Conecta los pines SDA y SCL: Conecta el pin SDA de la pantalla LCD al pin SDA del Arduino (A4 en el Arduino Uno) y el pin SCL de la pantalla LCD al pin SCL del Arduino (A5 en el Arduino Uno).
- Alimenta la pantalla: Conecta el pin VCC de la pantalla LCD al pin de 5V del Arduino y el pin GND de la pantalla al pin GND del Arduino.
Programación Básica
Utiliza la biblioteca LiquidCrystal_I2C para controlar la pantalla LCD I2C. Aquí tienes un ejemplo de cómo configurarla y mostrar un mensaje:
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// Configura la dirección de la pantalla (generalmente es 0x27 o 0x3F)
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup() {
lcd.init(); // Inicializa la pantalla
lcd.backlight(); // Activa la retroiluminación
lcd.setCursor(0, 0); // Posiciona el cursor
lcd.print("Hola, Mundo!"); // Muestra el mensaje
}
void loop() {
}Sensores I2C
Los sensores con interfaz I2C son ampliamente utilizados debido a su facilidad de integración y la variedad de opciones disponibles. Algunos de los sensores más comunes incluyen:
- Acelerómetros y Giroscopios: Como el MPU6050, que combina un acelerómetro y un giroscopio en un solo chip, permitiendo medir la aceleración y la orientación.
- Sensores de Temperatura y Humedad: Como el DHT12 o el HTU21D, que proporcionan mediciones precisas de temperatura y humedad.
Ejemplo de Conexión y Lectura
Para conectar y leer datos de un sensor de temperatura y humedad HTU21D, sigue estos pasos:
- Conexión:
- Conecta el pin SDA del sensor al pin SDA del Arduino.
- Conecta el pin SCL del sensor al pin SCL del Arduino.
- Conecta VCC y GND del sensor a 3.3V y GND del Arduino respectivamente.
- Código de Lectura:
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_HTU21DF.h>
Adafruit_HTU21DF htu = Adafruit_HTU21DF();
void setup() {
Serial.begin(9600);
if (!htu.begin()) {
Serial.println("No se pudo encontrar el sensor HTU21D");
while (1);
}
}
void loop() {
float temp = htu.readTemperature();
float hum = htu.readHumidity();
Serial.print("Temp: "); Serial.print(temp); Serial.print(" *C, ");
Serial.print("Hum: "); Serial.print(hum); Serial.println(" %");
delay(2000);
}Expansores de Puertos I2C
Los expansores de puertos como el MCP23017 permiten aumentar el número de pines de entrada/salida disponibles en tu Arduino, lo que es útil en proyectos donde se necesita controlar muchos componentes.
Conexión y Configuración
- Conexión:
- Conecta SDA y SCL del MCP23017 a los pines correspondientes del Arduino.
- Conecta VCC y GND a 5V y GND del Arduino.
- Código de Configuración:
#include <Wire.h>
#include "Adafruit_MCP23017.h"
Adafruit_MCP23017 mcp;
void setup() {
mcp.begin(); // Inicializa con la dirección por defecto (0)
mcp.pinMode(0, OUTPUT); // Configura el pin 0 como salida
}
void loop() {
mcp.digitalWrite(0, HIGH); // Enciende el pin 0
delay(1000);
mcp.digitalWrite(0, LOW); // Apaga el pin 0
delay(1000);
}Optimización y Buenas Prácticas
Mejores Prácticas de Cableado
La correcta implementación del cableado es fundamental para asegurar la estabilidad y el rendimiento del bus I2C en tus proyectos de Arduino. Aquí hay algunas mejores prácticas para garantizar una conexión robusta:
- Uso de Cables Cortos: Mantén los cables lo más cortos posible para reducir la inductancia y la capacitancia parásitas, que pueden interferir con las señales I2C.
- Organización y Orden: Evita el cruce de cables y organiza el cableado de manera ordenada para minimizar la interferencia electromagnética (EMI).
- Conexión a GND: Asegúrate de que todos los dispositivos conectados al bus I2C compartan un punto común de tierra (GND) para evitar diferencias de potencial que puedan afectar la comunicación.
Técnicas para Evitar Conflictos de Direccionamiento
El direccionamiento en el bus I2C puede ser un desafío, especialmente cuando tienes múltiples dispositivos con direcciones fijas. Aquí tienes algunas estrategias para manejar estos conflictos:
- Configuración de Direcciones Variables: Algunos dispositivos permiten cambiar su dirección mediante la configuración de pines de dirección (AD0, AD1, etc.). Consulta el datasheet del dispositivo para saber cómo ajustar estos pines.
- Uso de Multiplexores I2C: Si tienes múltiples dispositivos con la misma dirección y no puedes cambiarla, considera usar un multiplexor I2C como el TCA9548A. Este dispositivo permite seleccionar entre varios buses I2C, cada uno con su propio conjunto de dispositivos.
- Segmentación del Bus: En proyectos grandes, segmentar el bus I2C en varias sub-redes puede ayudar a manejar mejor los dispositivos y evitar conflictos de dirección.
Optimización del Rendimiento
Optimizar el rendimiento del bus I2C puede hacer una gran diferencia en la eficiencia de tus proyectos. Aquí hay algunas recomendaciones:
- Ajuste de la Velocidad del Bus: Usa la función
Wire.setClock(frecuencia)para ajustar la velocidad del bus I2C según las necesidades de tu proyecto. Para aplicaciones estándar, 100 kHz es suficiente, pero puedes aumentarla hasta 400 kHz o más si tus dispositivos lo soportan. - Uso Eficiente de la Memoria: Dado que la biblioteca Wire utiliza un búfer de 32 bytes, asegúrate de no exceder este límite en una sola transmisión. Divide los datos en bloques más pequeños si es necesario.
- Manejo de Errores: Implementa rutinas de manejo de errores para gestionar situaciones donde los dispositivos no responden. Esto puede incluir reintentos de transmisión o restablecimientos del bus.
Siguiendo estas buenas prácticas y técnicas de optimización, puedes asegurar una comunicación I2C confiable y eficiente en tus proyectos de Arduino, permitiendo un rendimiento óptimo y una mayor estabilidad.
Solución de Problemas Comunes
Diagnóstico de Problemas de Comunicación
La comunicación en el bus I2C puede enfrentarse a varios problemas que afectan su funcionamiento. A continuación, se detallan algunos problemas comunes y cómo diagnosticarlos:
- Problemas de Conexión:
- Verificar Conexiones: Asegúrate de que los cables SDA y SCL estén correctamente conectados. Un mal contacto puede interrumpir la comunicación.
- Comprobar Alimentación: Verifica que todos los dispositivos estén correctamente alimentados y compartan una referencia de tierra común.
- Problemas de Dirección:
- Scanner I2C: Usa un escáner I2C para verificar que todos los dispositivos en el bus están respondiendo con la dirección correcta. El siguiente código es útil para identificar dispositivos conectados:
#include <Wire.h>
void setup() {
Wire.begin();
Serial.begin(9600);
while (!Serial); // Espera a que el puerto serie esté listo
Serial.println("\nI2C Scanner");
}
void loop() {
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for (address = 1; address < 127; address++) {
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0) {
Serial.print("Dispositivo I2C encontrado en la dirección 0x");
if (address < 16) Serial.print("0");
Serial.print(address, HEX);
Serial.println(" !");
nDevices++;
} else if (error == 4) {
Serial.print("Error desconocido en la dirección 0x");
if (address < 16) Serial.print("0");
Serial.println(address, HEX);
}
}
if (nDevices == 0) Serial.println("No se encontraron dispositivos I2C\n");
else Serial.println("Se encontraron todos los dispositivos\n");
delay(5000); // Espera 5 segundos antes de escanear de nuevo
}Soluciones para Errores de Sincronización
Los errores de sincronización pueden surgir debido a varias razones, desde el ruido en las líneas hasta problemas de software. Aquí hay algunas soluciones comunes:
- Ajuste de Resistencias Pull-Up:
- Las resistencias pull-up son esenciales para el correcto funcionamiento del bus I2C. Si estás experimentando problemas, puede ser necesario ajustar el valor de estas resistencias. Valores típicos van desde 4.7kΩ hasta 10kΩ.
- Implementación de Retries:
- Implementa un mecanismo de reintentos en tu código para manejar fallos temporales de comunicación. Un ejemplo de esto es intentar varias veces una operación de lectura/escritura antes de reportar un error.
Herramientas de Depuración
Existen varias herramientas y técnicas que puedes usar para depurar problemas en el bus I2C:
- Analizador Lógico:
- Un analizador lógico puede capturar y analizar las señales SDA y SCL, permitiéndote ver los datos transmitidos y detectar errores en la comunicación.
- Monitor Serie:
- Utiliza el monitor serie del IDE de Arduino para imprimir mensajes de depuración y monitorear el estado de la comunicación I2C.
Implementando estas estrategias y soluciones, puedes resolver la mayoría de los problemas comunes en la comunicación I2C, asegurando un funcionamiento estable y confiable de tu sistema.
Conclusión
Como hemos podido comprobar en este artículo, estos buses simplifican el trabajo.
Con el uso de cuatro pines podemos no solamente utilizar un dispositivo que normalmente requeriría 16 pines. Es que podemos conectar todos los que necesitemos.
¿Quieres poner 4 pantallas 16×2 en tu proyecto? ¿Por qué no?
De hecho, estos buses, por permitir, nos permiten incluso conectar varios Arduinos para tener mayor capacidad de procesamiento en hardware complejo:
Tiene uso para todo, y es que como te decía en la introducción, tarde o temprano toca utilizarlo, parece complejo de inicio pero realmente es una herramienta que simplifica el trabajo de gran manera.
Este tipo de avances nos permiten simplificar el proceso de trabajo de nuestros proyectos.
Y es que antes de terminar, y con este conocimiento en mente, puedes descubrir muchísimas aplicaciones prácticas para estos aquí.